

- 水下传感网络
水下航行器可以分为自主式水下航行器(Autonomous Underwater Vehicle,AUV)、有缆遥控水下航行器(Remotely Operated Vehicles,ROV)和载人水下航行器等。相比于ROV,AUV活动范围更广、潜水深度更大、能适应更为复杂的工作环境以及不需要水面平台提供支持; AUV与载人水下航行器相比具有安全、结构简单、尺寸小、造价低等优点。AUV依靠自动控制系统与自身能源动力系统,在水下自主完成预设的目标和任务,在军事和民用方面均得到了广泛的应用。
近些年来,虽然水下航行器得到空前发展,但仍有大量难点需要突破。比如,AUV智能控制系统、精确的定位导航、水下通信等。本中心“水下组”致力于自主式水下航行器相关技术与难点的研究,主要研究内容分为理论和AUV研发两部分:理论研究主要包括如下几个方面:
1)AUV动力学建模:要实现AUV的自动控制,其自身动力学模型的建立是基础且重要的工作。此方向的工作主要是针对本中心自主研制的多款AUV进行模型建立、测试以及优化。
2)AUV多源信息融合技术:多源信息融合技术主要是对AUV接收或采集到的信息进行数据融合处理,从而得到有用信息。信息源主要包括AUV挂载的多个传感器以及水下无线网络中的其它节点。此方向工作主要是进行信息融合算法的设计与研究,以应对水下各种应用需求。
3) 除上述两个研究方向,本中心还在了包含水动力学分析,AUV机构设计优化,水下无线网络等多个AUV相关领域开展研究工作。理论研究的同时,本中心还自主研制了多款AUV:
AUV内部动力来自大容量电池,尾部配置4螺旋桨动力系统,内有压水仓可实现上浮与下潜,头部布置X型稳水姿态翼板,自身无舵,可实现水下各种姿态控制。AUV的研制工作和理论研究相辅相成,理论研究可以促进和带动AUV的研制工作,AUV可以作为实验平台为理论研究提供硬件支持。随着AUV相关研究的逐步深入,本中心后续还会开展多AUV水下组网等研究。
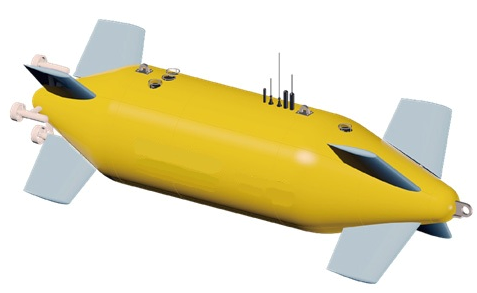
AUV立体图
水下自主无人航行器
- 上一个:水声定位 | 下一个:无