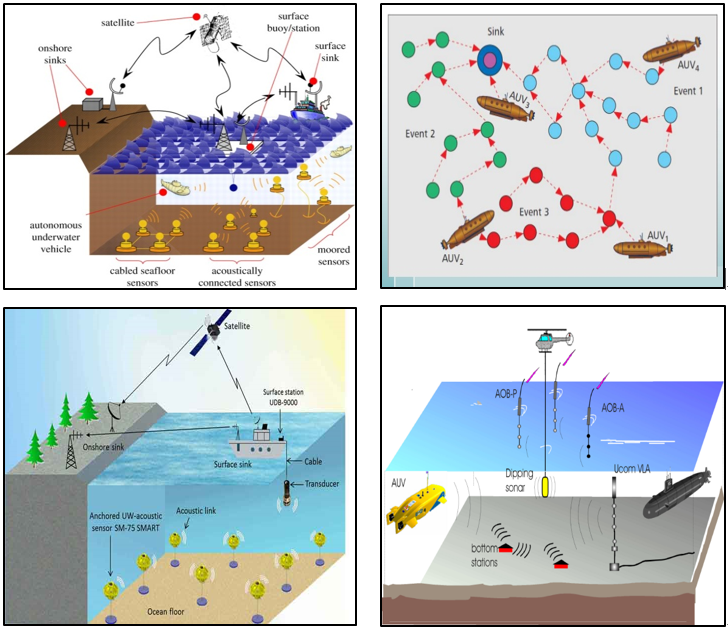
- 水下传感网络
水声定位,作为支撑水下传感器网络的一大核心技术,能够为节点提供位置标定,从而使得由传感器采集的信息具有现实的意义。同时水下目标跟踪,通信路由以及协同作业的进行也离不开水声定位技术的发展。
水下环境与陆地环境间存在巨大区别。深海中难以布置参考节点,节点的漂移以及同步问题等都不可避免地影响着水声定位的开展。同时,水下声信号的传播时延,多径,时变以及节点能量消耗等问题也对水声定位技术的发展提出了新的挑战。目前,我国仅有少数机构在进行水声定位技术的研究,并且受人力,资金,市场需求的限制,与国外的发展水平存在一定的差距。
本中心“水下组”对水声定位的研究主要分为联合同步定位,机会式定位以及测距算法三个部分:
1)联合同步定位:基于时延的测距定位算法的实施,通常以节点间的同步为前提。而节点的同步也依赖于节点的位置信息。通过有效的联合同步定位算法,同时解决节点定位和同步问题,已成为“水下组”在水声定位中的一个研究方向;
2)机会式定位:锚节点的移动性,造成待定位节点仅在有限时间段内处于锚节点的通信范围内。而定位的成功性是由待定位节点是否接收到充分的数据来衡量的。因此节点的定位是机会式的。通过对机会式定位成功率的分析,进行定位算法优化,已成为“水下组”的另一研究方向;
3)测距算法:目前的水声定位多围绕测距定位算法展开,通过测量待定位节点与参考节点间的距离实现定位。在测距定位算法中,以RSSI,TDoA,ToA几种算法的应用最为广泛。这些算法主要通过接收信号的强度,信号传输时延实现测距。而如DV-Hop,DHL等的非测距定位算法,由于其较低的定位精度,应用并不广泛。目前,“水下组”主要采用ToA以及TDoA算法实现测距定位。