

- 水下传感网络
目前常用的水下无线通信方式包括水下声通信、水下光通信和水下电磁波通信。水声通信以其通信距离远、通信范围大的特点成为了水下无线通信最常用的选择,然而由于声音在水下传输速率只有1500m/s,还有水声无线信道时变性强、多普勒效应和多径效应严重的特性,导致陆地常用的无线通信算法和网络协议不能很好的直接应用在水声通信中。
本中心研发的水声通信系统针对水下环境存在的挑战,对陆地端的无线通信算法和网络协议进行了改进,实现了无线信息在水下的全方向、可靠、低功率传输。
通信算法研究
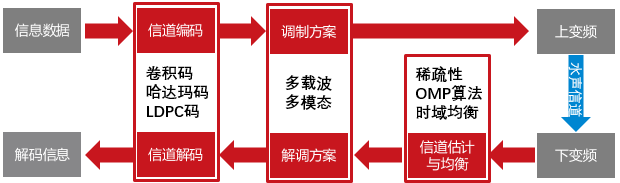
水声通信算法一般包括同步方案、信道编解码、调制解调方案、信道估计与均衡和上下变频几个部分,由于我们采用了多种调制解调方案,因此需要对每种调制方式进行单独的通信算法设计。
首先针对MFSK调制方式,我们采用了卷积码和哈达玛码联合编码的方案,在保证误码率要求的基础上兼顾了码率的灵活性,采用软解码的方式进一步提高了系统性能,由于MFSK抗干扰能力比较强,因此对于MFSK调制方式并不需要进行信道估计均衡。
对于OFDM调制方式,我们采用了LDPC编码方式,这种编码方式具有更强的纠错性能,可以针对不同的相位调制方式采用不同长度的LDPC编码以保证性能,信道估计方案中考虑到水声信道的稀疏性,我们采用了OMP算法来正交匹配稀疏信道,并利用时域均衡的方法消除信道的影响。
水声通信系统实现
本中心研发的ISEA水声通信机是一款基于OMAPL138(ARM+DSP)双核芯片的软件定义的水声调制解调器,其体积小巧可内置于水下设备中作为水下设备的无线通信模块。目前硬件板卡支持2路发送4路接收的功能,可以实现简单的水下MIMO通信。用户可以通过网线/无线与板卡的ARM端进行通信,通过ARM端来控制DSP端实现信号的收/发。目前板卡已实现的物理层算法四种,分别为多载波MFSK、OFDM-QPSK、OFDM-QAM16和OFDM-QAM64,每种调制方式的性能指标如下:

跨介质海空协同系统
对于水下作业需要取回数据的问题,现有常用的方法是布置水下光缆网,或者将数据存在设备中,与设备一起取回。前者消耗大量人力物力,成本高昂,且灵活性差;后者无法将数据及时回传给工作人员,实时性差。针对这一问题,我们提出了一种跨介质的信息传输方案,能实现水下终端与陆上终端的实时数据交互。其基本思路是:潜器等水下终端在水下采集信息,通过水声通信机与水面上的浮标通信,将信息传到浮标中继,也可从浮标处获取来自陆地的指令;水面浮标作为中继,向下通过水声通信机与水下终端通信,向上通过无线模块与无人机通信;无人机在空中飞行拍摄,可以从空域做信息采集工作。同时,它还承担着陆上基站与海上浮标的中继作用;陆上基站是总控制室,负责处理水下传来的数据以及向水下终端发送控制指令。
在水下端,我们针对自主研发的水声通信机进行了优化,提出了一种自适应调制的方案,根据接收的信噪比情况反馈给发送端一段特殊的波形,发送根据反馈信息确定应该使用的调制方式和发射功率,这种方式在可以保证信息的可靠传输的条件下尽可能的降低系统的功耗;
在空中端,采用了Parrot无人机作为空中信息采集中心,通信方式为Wifi方式,通过对Parrot应用层的修改去除掉了与水下协议不兼容的Zeroconfig协议,提高了整个系统的传输效率,无人机具有两种功能,通过Ftp协议发送图片和直接通过Socket传输控制信息;
在浮标端,由于空中和水下带宽差距极大,因此作为中继的浮标需要针对带宽问题进行协议上的优化,考虑到无人机向下传输图片时,如果浮标直接按照Ftp协议向下转发数据,那么水下信道可能会在相当长的一段时间被占用为发图片信息状态,这样的话水下端既不能接受到控制信息,也不能向上反馈状态信息或控制信息,因此我们对浮标转发协议进行了重新的设计,采用了基于TDMA的转发方式,在发送图像数据的中间添加部分时间段来传输控制信息,以此保证系统的实时性。

跨介质传输
- 上一个:无 | 下一个:水声定位